Vorbereitung
Öffnet MakeCode und erstellt ein neues Projekt.
Aufgabe 1 - Laufzeit-Anzeige
- Erstelle zwei Variablen (
StartZeitundLaufZeit).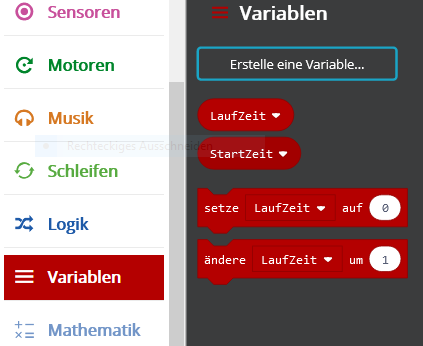
- Öffne die Schublade "Steuerung" unter "Fortgeschritten". Hier findest du den Block
Millisekunden (ms).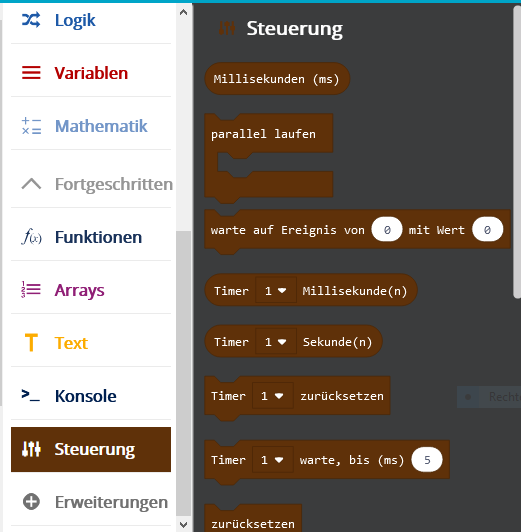
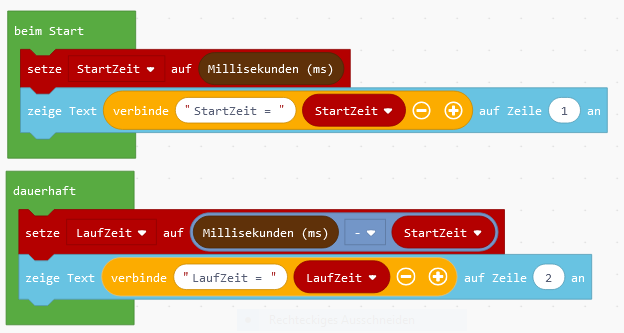
- Erstelle das folgende Programm und probiere es auf deinem Roboter aus.
Aufgabe 2 - Stoppuhr
- Modifiziere dein Programm so, dass es die Zeit in Sekunden anzeigt anstatt in Millisekunden.
- Modifiziere dein Programm aus Aufgabe 1 so, dass es wie eine Stoppuhr funktioniert, wenn man die Entertaste (dunkelgraue Taste in der Mitte) drückt.
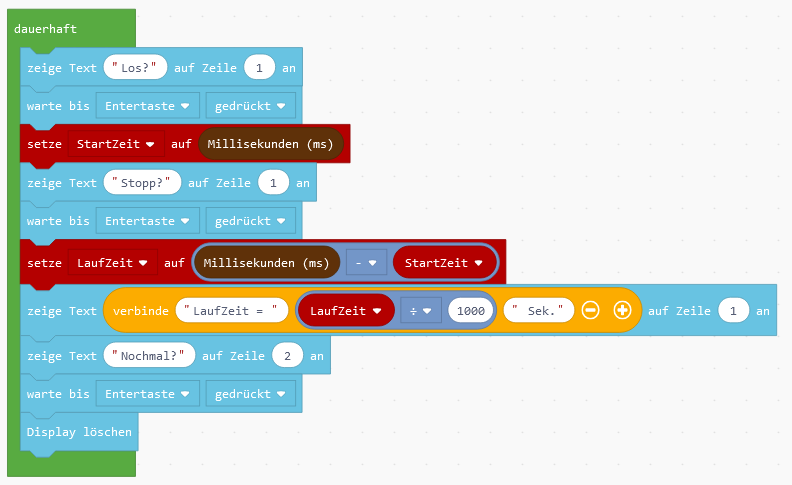
Lösung zu Aufgabe 2
Fachkonzept Funktion
Funktionen werden benutzt, um Codeblöcke, die mehrfach benötigt werden, zusammenzufassen.
- Erstelle in MakeCode ein neues Projekt.
- Erstelle eine Funktion
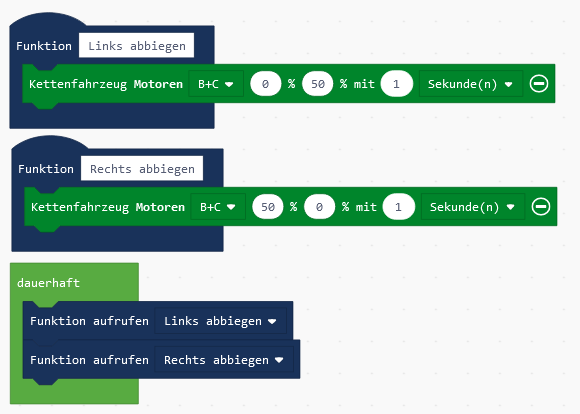
Links abbiegenund eine FunktionRechts abbiegen: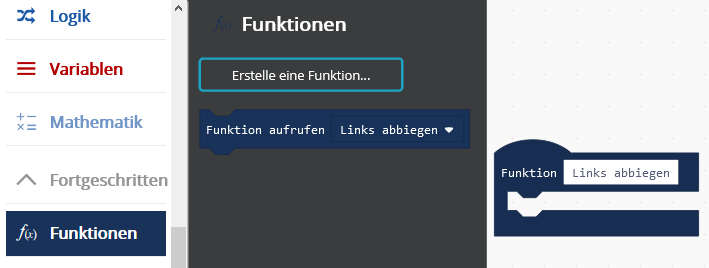 .
. - Erstelle danach das folgende Programm und probiere es aus:
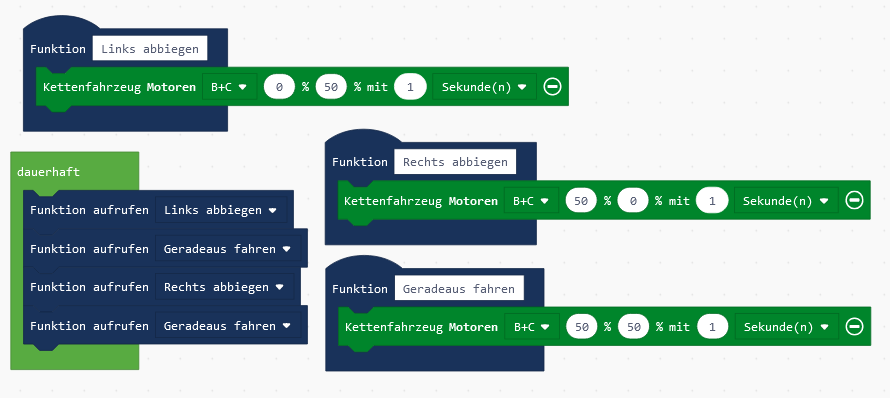
Aufgabe 3 - Zick-Zack-Fahren
- Modifiziere dein Programm aus dem Beispiel so, dass es nach jedem Abbiegen auch eine Sekunde geradeaus fährt. Nutze dazu eine neue Funktion
Geradeaus fahren.
Lösung Aufgabe 3
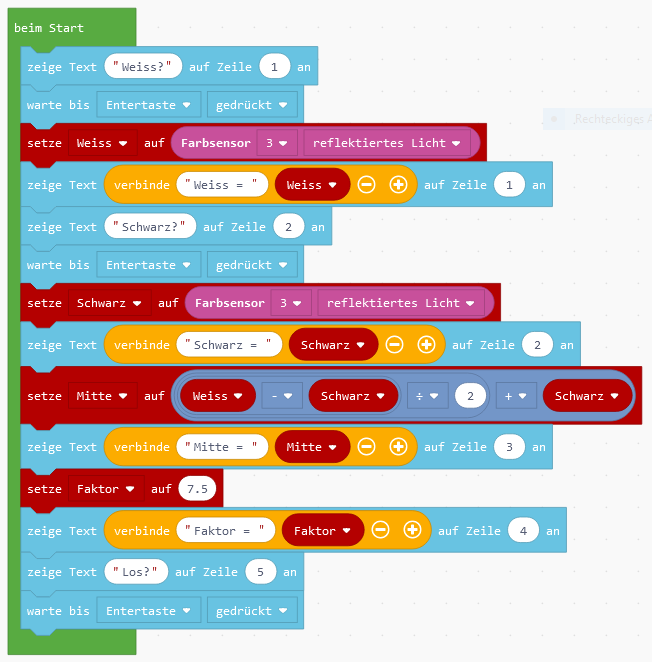
Linie folgen mit Abbiegen
Nun wollen wir unseren Roboter mit einem Navigationsgerät versehen. Dazu können wir Zeitmessung und Funktionen benutzen.
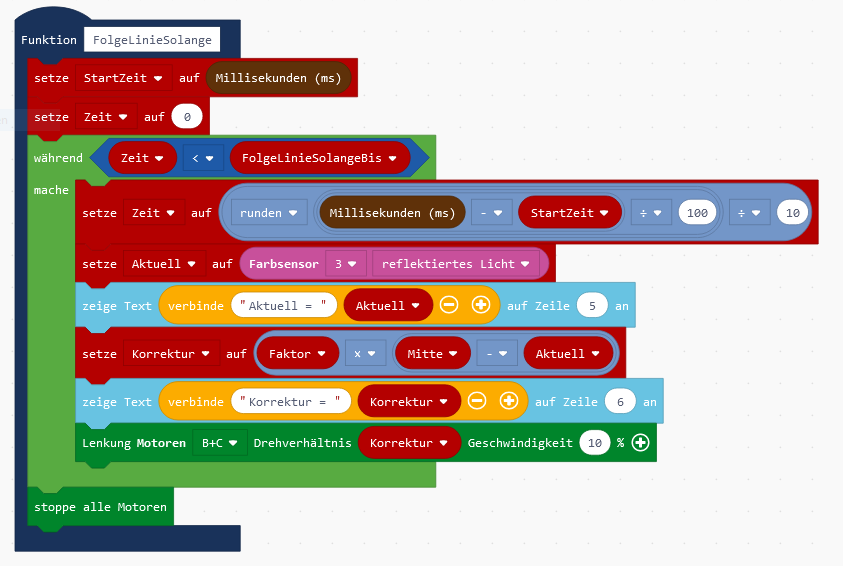
Aufgabe 4
- Erstelle das folgende Programm:
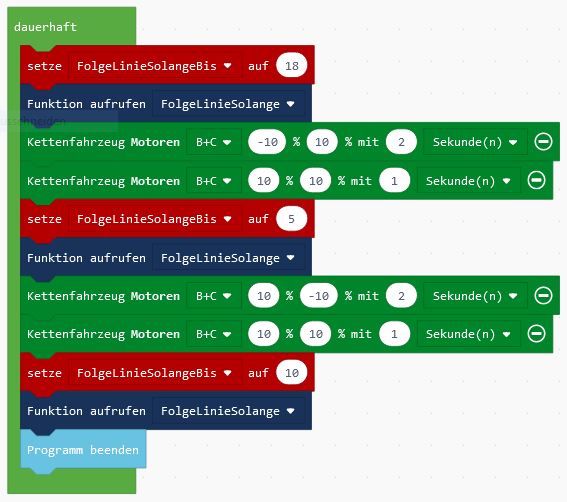
- Modifiziere das Programm so, dass der Roboter unterschiedliche Ziele erreicht (z.B. nicht nur den Container-Hafen). Hierzu musst du "nur" die
FolgeLinieSolangeBis-Variable und die Blöcke imdauerhaft-Block ändern. Denbeim Start-Block und die FunktionFolgeLinieSolangemusst du nicht verändern.
Lösung für Aufgabe 4