Eine Problematik, weswegen der Roboter unzuverlässig fährt, ist die Tatsache, dass der Lichtsensor relativ empfindlich ist. Er reagiert auch auf Änderungen an der Umgebungshelligkeit (z.B. Sonneneinstrahlung).
Um dieses Problem zu beheben, ist es wichtig, den Lichtsensor vor dem Start des Programms zu kalibrieren.
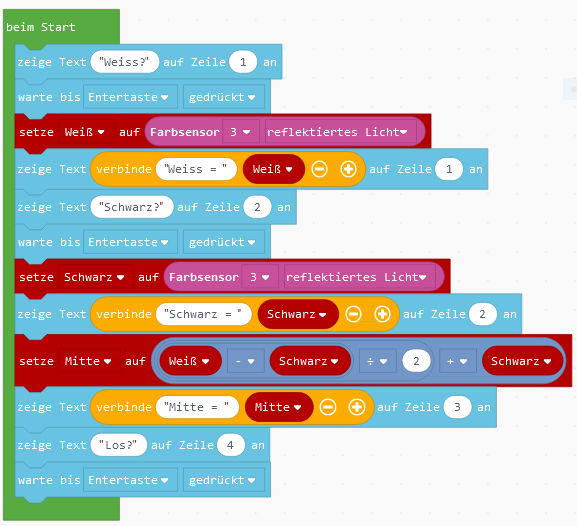
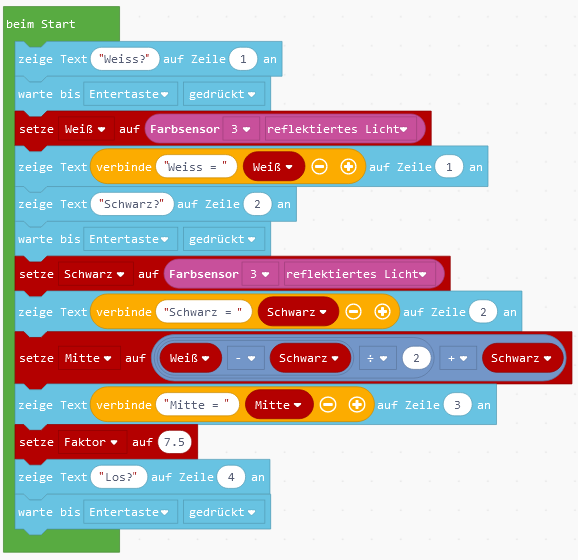
a) Erstelle die vier Variablen Schwarz, Weiß, Mitte und Aktuell.

b) Um den Lichtsensor zu kalibrieren, ist es sinnvoll zu messen, welche Werte er tatsächlich für schwarz bzw. weiß misst. Dazu muss der Roboter zuerst auf eine schwarze Fläche und danach auf eine weiße Fläche gesetzt werden. Diese Werte kann man speichern, um sie später wieder abrufen zu können. Außerdem sollte ein Wert für die Mitte zwischen diesen beiden Werten berechnet werden, der entscheidet, ob man eher nach links oder rechts fahren sollte.